Ankitsrihbti Authors Sergey Levine
7 days
30 days
All time
Recent
Popular

Can we get robots to follow language directions without any data that has both nav trajectories and language? In LM-Nav, we use large pretrained language models, language-vision models, and (non-lang) navigation models to enable this in zero shot!
https://t.co/EVsFOj1JhS
Thread:
LM-Nav first uses a pretrained language model (LLM) to extract navigational landmarks from the directions. It uses a large pretrained navigation model (VNM) to build a graph from previously seen landmarks, describing what can be reached from what. Then...
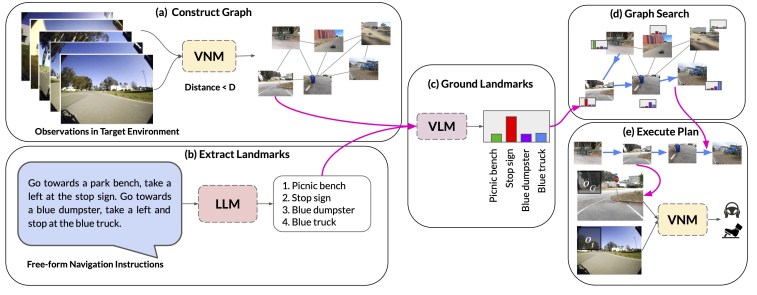
It uses a vision-language model (VLM, CLIP in our case) to figure out which landmarks extracted from the directions by the LLM correspond to which images in the graph, and then queries the VNM to determine the robot controls to navigate to these landmarks.
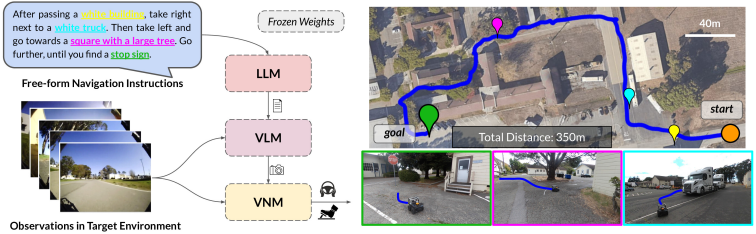
The results in fully end-to-end image-based autonomous navigation directly from user language instructions. All components are large pretrained models, without hand-engineered localization or mapping systems. See example paths below.

LM-Nav uses the ViKiNG Vision-Navigation Model (VNM): https://t.co/oR1bplIvMt
This enables image-based navigation from raw images.
w/ @shahdhruv_, @blazejosinski, @brian_ichter
Paper: https://t.co/ymU9kALQ9G
Web: https://t.co/EVsFOj1JhS
Video:
https://t.co/EVsFOj1JhS
Thread:
LM-Nav first uses a pretrained language model (LLM) to extract navigational landmarks from the directions. It uses a large pretrained navigation model (VNM) to build a graph from previously seen landmarks, describing what can be reached from what. Then...
It uses a vision-language model (VLM, CLIP in our case) to figure out which landmarks extracted from the directions by the LLM correspond to which images in the graph, and then queries the VNM to determine the robot controls to navigate to these landmarks.
The results in fully end-to-end image-based autonomous navigation directly from user language instructions. All components are large pretrained models, without hand-engineered localization or mapping systems. See example paths below.
LM-Nav uses the ViKiNG Vision-Navigation Model (VNM): https://t.co/oR1bplIvMt
This enables image-based navigation from raw images.
w/ @shahdhruv_, @blazejosinski, @brian_ichter
Paper: https://t.co/ymU9kALQ9G
Web: https://t.co/EVsFOj1JhS
Video: