
2/n
In this thread, I have documented the violence against Muslims in India after 1950. Since there is a lot of whataboutery on the violence during the partition, I have collected the data AFTER the partition and the implementation of the Indian constitution.
LONG THREAD
1/n
2/n
3/n
4/n
5/n
6/n
7/n
8/n
9/n
10/n
11/n
12/n
13/n
14/n
15/n
16/n
17/n
One of the reasons behind this was the jealousy around the huge and famous lock industry in Aligarh where Muslims were doing fairly well.
18/n
Muradabad is a major industrial hub too.
The systemic targetting of the cities where Muslims had a stronghold in the business is noteworthy.
19/n
20/n
21/n
22/n
23/n
24/n
25/n
26/n
27/n
28/n
29/n
30/n
31/n
32/n
33/n
34/n
https://t.co/0GC5GOmdEy
35/35
----END----
The brutality against Muslims is not something new in India. In this thread, I am documenting the large scale, targeted and repeated Anti-Muslim pogroms in the Secular Democracy of India after 1986, inspired by the ideology of fascist RSS.
— \u0639\u0644\u064a (@OpusOfAli) September 9, 2019
LONG THREAD 1/n
More from All












How can we use language supervision to learn better visual representations for robotics?
Introducing Voltron: Language-Driven Representation Learning for Robotics!
Paper: https://t.co/gIsRPtSjKz
Models: https://t.co/NOB3cpATYG
Evaluation: https://t.co/aOzQu95J8z
🧵👇(1 / 12)
Videos of humans performing everyday tasks (Something-Something-v2, Ego4D) offer a rich and diverse resource for learning representations for robotic manipulation.
Yet, an underused part of these datasets are the rich, natural language annotations accompanying each video. (2/12)
The Voltron framework offers a simple way to use language supervision to shape representation learning, building off of prior work in representations for robotics like MVP (https://t.co/Pb0mk9hb4i) and R3M (https://t.co/o2Fkc3fP0e).
The secret is *balance* (3/12)
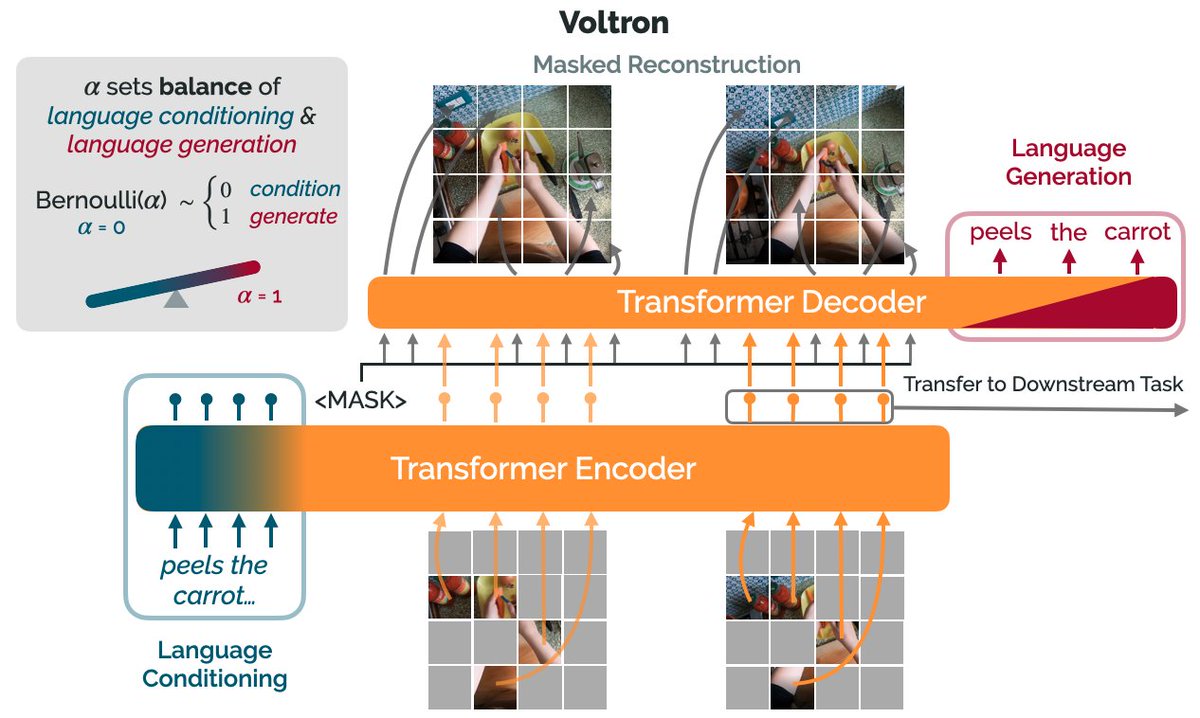
Starting with a masked autoencoder over frames from these video clips, make a choice:
1) Condition on language and improve our ability to reconstruct the scene.
2) Generate language given the visual representation and improve our ability to describe what's happening. (4/12)
By trading off *conditioning* and *generation* we show that we can learn 1) better representations than prior methods, and 2) explicitly shape the balance of low and high-level features captured.
Why is the ability to shape this balance important? (5/12)
Introducing Voltron: Language-Driven Representation Learning for Robotics!
Paper: https://t.co/gIsRPtSjKz
Models: https://t.co/NOB3cpATYG
Evaluation: https://t.co/aOzQu95J8z
🧵👇(1 / 12)
Videos of humans performing everyday tasks (Something-Something-v2, Ego4D) offer a rich and diverse resource for learning representations for robotic manipulation.
Yet, an underused part of these datasets are the rich, natural language annotations accompanying each video. (2/12)
The Voltron framework offers a simple way to use language supervision to shape representation learning, building off of prior work in representations for robotics like MVP (https://t.co/Pb0mk9hb4i) and R3M (https://t.co/o2Fkc3fP0e).
The secret is *balance* (3/12)
Starting with a masked autoencoder over frames from these video clips, make a choice:
1) Condition on language and improve our ability to reconstruct the scene.
2) Generate language given the visual representation and improve our ability to describe what's happening. (4/12)
By trading off *conditioning* and *generation* we show that we can learn 1) better representations than prior methods, and 2) explicitly shape the balance of low and high-level features captured.
Why is the ability to shape this balance important? (5/12)












