Ācārya Abhimānam (taking spiritual refuge in a preceptor/teacher/ācārya) is greatly lauded by Svāmī Pillai Lokāchārya in the Śrīvāchāna Bhūṣaṇam while laying out the nuts and bolts of the process.
Svāmī establishes in Sūtram 461 that it's another one of Viṣṇu's . . .

Here, the fourth Thiruvantāḍi, pāsuram 89, is quoted to prove the efficacy of . . .
Now, what scriptural sources are considered the authorities of Ācārya Abhimānam? Svāmī Lokāchārya in Sūtram 460 mentions four. First, he mentions pāsuram 10:10 of Āndāl's Nacchiyār Thirumozhi . . .
The second pāsuram that Svāmī Lokāchārya cites as an authority is the 18th one of the Fourth Thiruvantāḍi.
The third pāsuram that Svāmī Lokāchārya cites as an authority is the 65th one of Svāmī Ālavandār's Stotra Ratnam. This one reads: "Grant me your grace regardless of my own . . .
The last pāsuram that Svāmī Lokāchārya cites as an . . .
More from All








How can we use language supervision to learn better visual representations for robotics?
Introducing Voltron: Language-Driven Representation Learning for Robotics!
Paper: https://t.co/gIsRPtSjKz
Models: https://t.co/NOB3cpATYG
Evaluation: https://t.co/aOzQu95J8z
🧵👇(1 / 12)
Videos of humans performing everyday tasks (Something-Something-v2, Ego4D) offer a rich and diverse resource for learning representations for robotic manipulation.
Yet, an underused part of these datasets are the rich, natural language annotations accompanying each video. (2/12)
The Voltron framework offers a simple way to use language supervision to shape representation learning, building off of prior work in representations for robotics like MVP (https://t.co/Pb0mk9hb4i) and R3M (https://t.co/o2Fkc3fP0e).
The secret is *balance* (3/12)
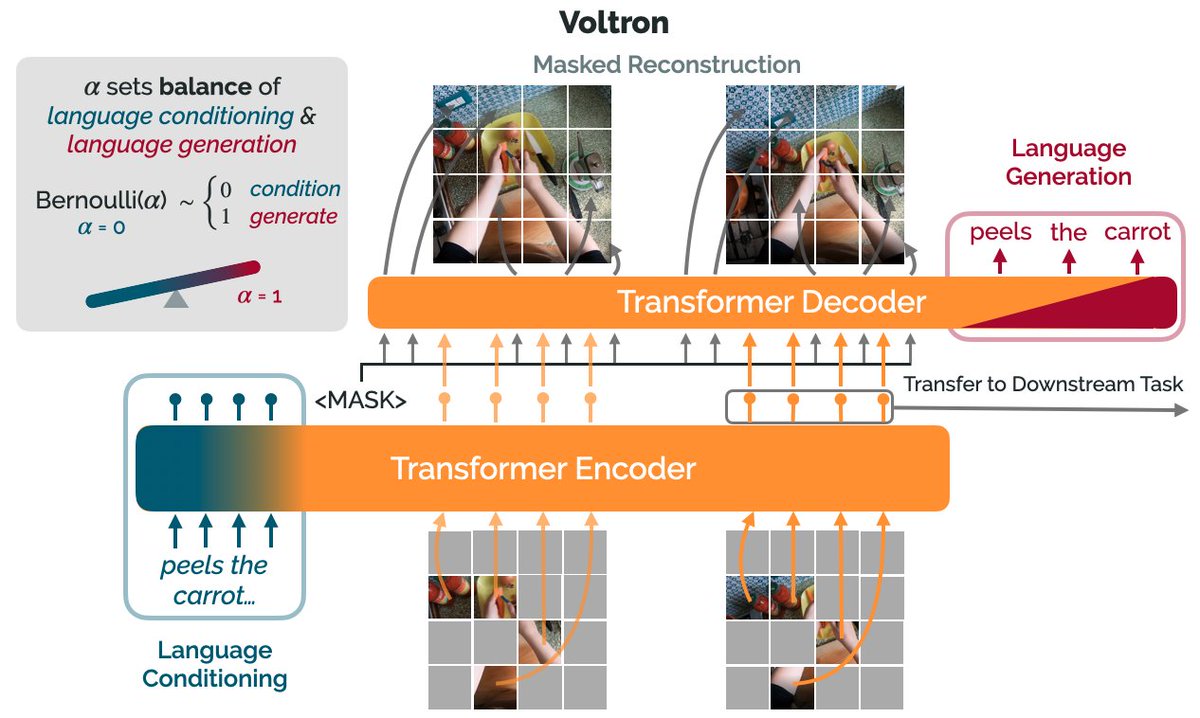
Starting with a masked autoencoder over frames from these video clips, make a choice:
1) Condition on language and improve our ability to reconstruct the scene.
2) Generate language given the visual representation and improve our ability to describe what's happening. (4/12)
By trading off *conditioning* and *generation* we show that we can learn 1) better representations than prior methods, and 2) explicitly shape the balance of low and high-level features captured.
Why is the ability to shape this balance important? (5/12)
Introducing Voltron: Language-Driven Representation Learning for Robotics!
Paper: https://t.co/gIsRPtSjKz
Models: https://t.co/NOB3cpATYG
Evaluation: https://t.co/aOzQu95J8z
🧵👇(1 / 12)
Videos of humans performing everyday tasks (Something-Something-v2, Ego4D) offer a rich and diverse resource for learning representations for robotic manipulation.
Yet, an underused part of these datasets are the rich, natural language annotations accompanying each video. (2/12)
The Voltron framework offers a simple way to use language supervision to shape representation learning, building off of prior work in representations for robotics like MVP (https://t.co/Pb0mk9hb4i) and R3M (https://t.co/o2Fkc3fP0e).
The secret is *balance* (3/12)
Starting with a masked autoencoder over frames from these video clips, make a choice:
1) Condition on language and improve our ability to reconstruct the scene.
2) Generate language given the visual representation and improve our ability to describe what's happening. (4/12)
By trading off *conditioning* and *generation* we show that we can learn 1) better representations than prior methods, and 2) explicitly shape the balance of low and high-level features captured.
Why is the ability to shape this balance important? (5/12)